運動控制器即為運動控制系統的大腦,並負責計算所需的移動軌道。由於此作業極為重要,因此往往於機板上的數位訊號處理器 (DSP) 執行,以避免主機電腦產生干擾 (應該沒有人喜歡運動作業因防毒軟體而中斷)。運動控制器將使用自己所計算的軌道,再決定合適的轉矩指令,並將之傳送至馬達放大器以產生運動。
運動控制器亦必須關閉 PID 控制迴路。由於此作業需要極高的精確度,且為穩定作業所必須,因此往往直接於機板上關閉控制迴路。除了關閉控制迴路,運動控制器亦監控緊急限制與停止功能,以確保作業安全。若能從機板或即時系統中直接進行上述作業,則可確保運動控制系統的穩定性、精確性,與安全性。
計算軌道
運動軌道,代表運動控制器的機板控制作業,或輸出至驅動/放大器的指令訊號,接著依循軌跡造成馬達/運動的行動。一般運動控制器均根據程式的參數值,以計算運動軌跡的軌道區段 (Trajectory segment)。運動控制器則使用所需的目標位置、最大目標速度,與使用者所提供的加速度值,以決定要於 3 項主要移動區段 (加速度、等速度,與減速度) 所耗費的時間。
針對一般梯形軌跡的加速度區段,將根據停止位置或先前的移動開始運動作業,並跟著指定的加速坡道 (Acceleration ramp) 動作,直到速度達到移動作業的目標速度。
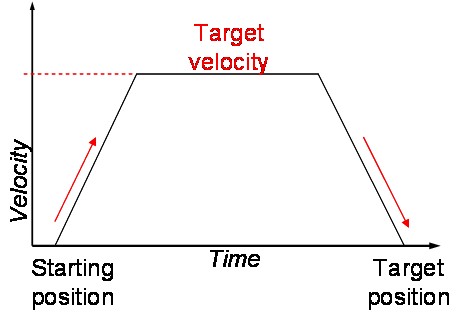
圖 5. 常見的梯形速度軌跡
運動作業可依目標速度持續所指定的時間,直到控制器決定開始減速度區段,並讓運動停止於所需的目標位置。
若運動作業極短,可於完成加速度之前即達到減速度開始點,則軌跡將接著呈現三角形而非梯形,且所達的實際速度可能低於所設定的目標速度。S 曲線 (S-curve) 加速度/減速度為基本的梯形軌道強化,即是針對加速度與減速度的坡道,將之修改為非線性的曲線軌跡。此坡道外觀的微調控制功能,可針對慣性、摩擦力、馬達動態,與其他機器運動系統的限制,依需要而調整運動軌道效能。