我們現在已經有這種技術,我們的機器人定位平台速度可以高達每秒鐘5公尺,定位的誤差只有10奈米(1奈米是十億分之一米)。這實在是很不錯的成績。這個機器人定位平台其實是在高度真空的環境下操作的,所以我們可以想見的到這個系統有多難,因為這個系統必須符合真空環境的需要,它的製作也都非常特別,不是普通處理成技術可以派上用場的。
一個精密儀器當然一定要有精密零組件,請見下圖一。
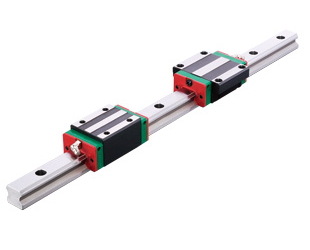 圖一
圖一這個零組件是機械上常用的,叫做線性滑軌。上面的滑塊是在滑桿上行動的,滑塊的速度可以到達每秒5米,加速度可以到達50 m/s2。
這個線性滑軌可以有兩根,這兩根是互相平行的,如圖二。
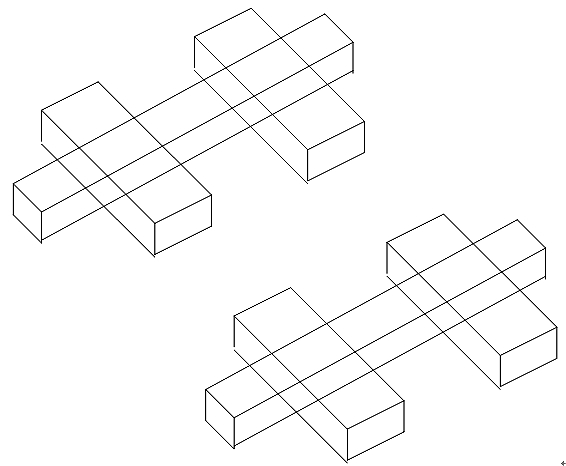 圖二
圖二我們可以看出兩個不同滑軌上的滑塊是互相獨立的,但是在高速行進時,兩個相對應滑塊之間的差距不能超過5微米(1微米是一百萬分之一米),對平台的平行度不能超過3微米。也就是說,左右兩對滑塊的速度要完全一樣,停止的時候也要停在幾乎完全一樣的地方。這需要非常穩定的滑軌,而且滑塊和滑軌中間幾乎是完全沒有摩擦力的。滑塊和滑軌之間有一個滾動元件,這個滾動元件表面的粗糙度一定要小於0.3微米。
以上所講的這些零組件內,都有東西在動。這些東西之所以會動,當然是由馬達驅動的,要驅動馬達並不是難的地方,但是要使馬達的驅動表現得非常精密,這就又要靠所謂的控制系統。我們國家現在就有這種能力能夠做出相當精密的控制系統,這是令我們感到高興的,我們國家的確是在進步之中。
