
有的時候馬達要驅的東西本身的剛性不太好,例如使用皮帶帶動移動,這個時候受控體本身就是一個彈性物,導致容易震盪的系統,如圖最上面兩個狀況,左邊的是旋轉的例子,右邊的則是線性直接驅動的例子。整理一些案例如:
* 聯軸器本身具有彈性
* 軸很長
* 皮帶
* 機台本身結構很軟
通常皮帶的阻尼係數d<0.1; 其自然頻率大約在10~200Hz之間,而且頻率隨著停留的位置不同而變化,當皮帶帶動到遠離馬達最遠的情形最軟也就是頻率最低。
通常驅動器的控制迴路所能影響的頻率範圍依存於扭力上昇時間(通常小於1ms)一般而言速度迴路都可以做到1000Hz左右。易言之,控制能力都在機構頻率之上,機構本身的耦合相對而言是軟的。因此,控制迴路可以提供的加速度變化能力大部份的時候都超過機構本身可以接受的範圍,也就是控制迴路輸出的扭力變化率快於機構的共振特性,所以機構根本承受不起如此的快速控制力道,這個有兩種壞處:
* 機構受到不正常的應力
* 定位精度不良或定位時間久
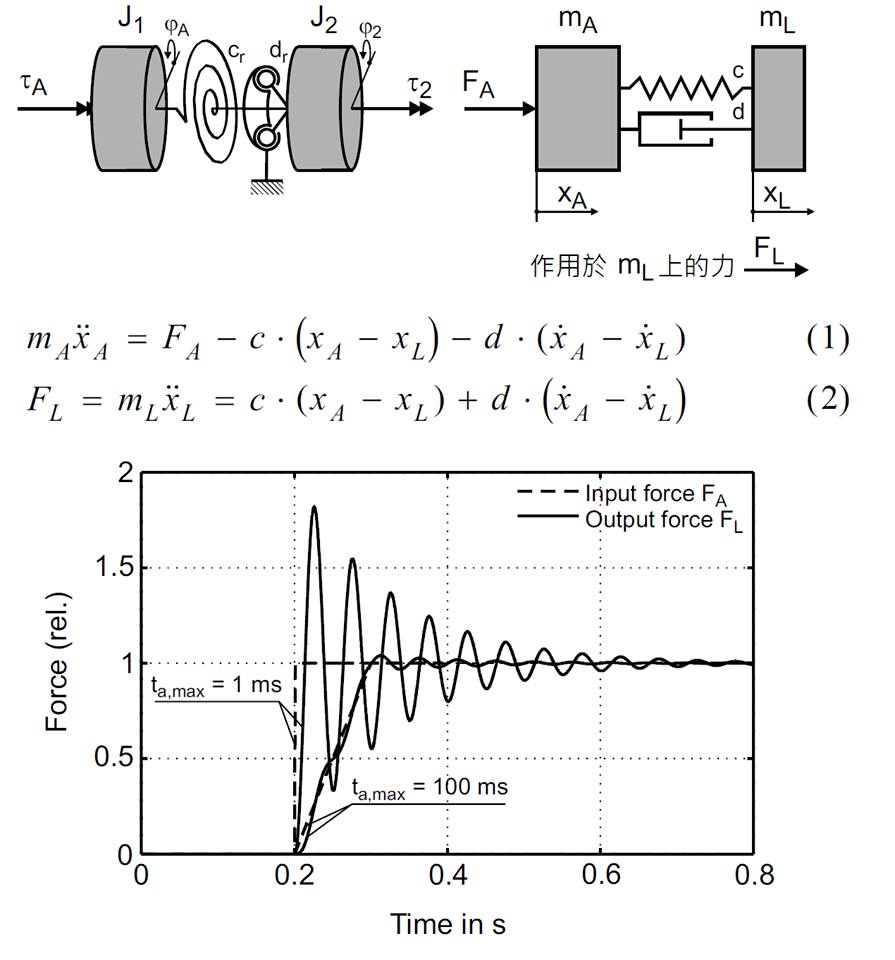
這樣的震動如何避免? 由於震動來自於激發,而激發最大的來源就是運動的路徑規畫本身。其實就是加速度的變化率,一個最簡單而有效的手段就是jerk limitation,限制加速度的增加速率。其原理可以從附圖最下面的曲線觀察:虛線表示馬達輸出,實線表示被帶動的工件的受力。圖中展示了兩種情形:
1. 扭力上昇時間很小約1ms的情形
2. 扭力上昇時間加大到100ms的情形
前者可以看到實線的工件受力晃動非常嚴重,震得很厲害。
後者可以看到實線的工件受力晃動小很多,運動過程比較穩定。
計算jerk limitation有一個簡單的原則:觀察震動本身的最小頻率,求出週期,將扭力上昇時間設定大於2倍震動週期就可以抑制震動。