
承接前文: 當馬達要驅動的物體軟趴趴的時候
viewtopic.php?f=4&t=602
中所討論的話題,為了驗證教科書所說的特性,讓我使用一個即時模擬器所跑出來的案例來跟大家分享。
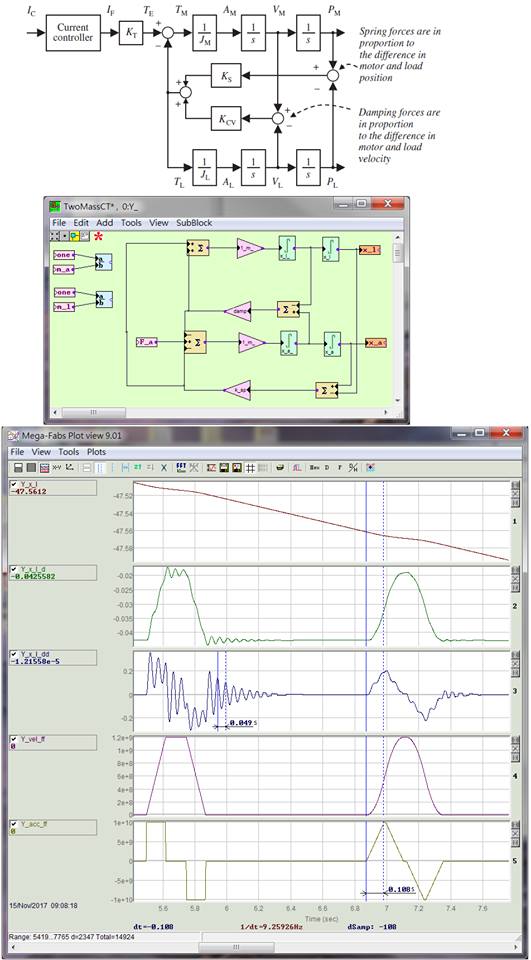
附圖最上面就是一個雙質量共振系統的控制方塊圖,它和前文的式(1)與(2)正是同樣的技術內容,只是把公式改成圖形表達,對於simulation有興趣的人,可以自己畫看看,保證你對控制系統與模擬技術的功力大增。
而方塊圖的下面就是模擬器裡面的圖,基本上就是把教科書的方塊圖建進去模擬器的人機介面中,需要一些類似CAD拉線還有方塊搬來搬去的實做,跟simulink差不多。
該模擬器乃是實際使用在工業應用中的計算核心,最大的特色是畫完方塊圖,基本上就以real time的方式載入執行,以本例子來講就好比在太空中用彈簧與阻尼器連結兩塊質量一樣,所有的物理量都是實時地呈現,比模擬還更貼近真實一點點。(有人也許會聯想到HIL: Hardware in the Loop)
模擬器裡面有預先建立好的路徑規畫器,可以設定距離,最大速度,加速度,jerk值,只要把方塊連線到我們的太空雙質量的上面就好了,具體而言就是把指令加速度信號(力量信號)拉進來圖中F_a的地方。
m_a: 大質量, 以100kg模擬
m_l: 小質量, 以2kg模擬, (L代表load的意思)
細節太複雜,講太多可能想睡覺,直接看最下面的圖,那是幾個物理量的輸出,分別為:
負載實際位置,
負載實際速度,
負載實際加速度,
路徑規劃器的速度輸出,
路徑規劃器的加速度輸出(其實就是加給m_a的外力)
壓軸來了, 該圖左半邊可以看到加入的力量直上直下毫不留情,所以實際速度很抖; 反觀右半邊加入的力量緩緩上升,緩緩下降(這就是jerk limitation的體現), 所以實際速度沒有抖, 正所謂立竿見影, 有加有保佑。
圖中有看到我標0.049s與0.108s的地方,說明一下,前者表示震盪週期0.049秒,後者呼應前文: 當馬達要驅動的物體軟趴趴的時候
文末寫計算jerk limitation的原則, 求出震盪週期, 把它乘以2, 就是你的最小扭力上昇時間, 從模擬中可以看到, 當我加入jerk limitation的時候, 我在太空中創造出來的雙質量系統, 運動就不再那麼抖了, 神奇嗎?