
CiA 402定義的控制模式
(1) PP (Profile Position Mode, 位置控制模式)
(2) PV (Profile Velocity Mode, 速度控制模式)
(3) PT (Profile Torque, 轉矩控制模式)
(4) IP (Interpolated Profile Position, 插補位置控制模式)
(5) HM (Homing Mode, 歸原點模式)
(6) CSP (Cyclic Synchronous Position, 週期同步位置模式)
(7) CSV (Cyclic Synchronous Velocity, 週期同步速度模式)
(8) CST (Cyclic Synchronous Torque, 週期同步轉矩模式)
Profile Position, Profile Velocity與Profile Torque模式,主要由從站負責軌跡規劃的部份,而主站能透過寫入相關參數,如速度、加速度、減加速度、急停減加速度等,主站僅負責傳送目標的位置、速度或轉矩目標。
三種控制模式中,Profile Velocity和Profile Torque模式,當從站收到由主站送出的目標速度或轉矩命令時,即透過從站產生內插的運動命令,而Profile Position模式會先將目標位置存入後,等待由主站PDO(*註) Control Word送出的命令後才開始移動,並能選擇是否立即改變目標位置,或等待上一個目標位置到達後再移動到新的目標位置。
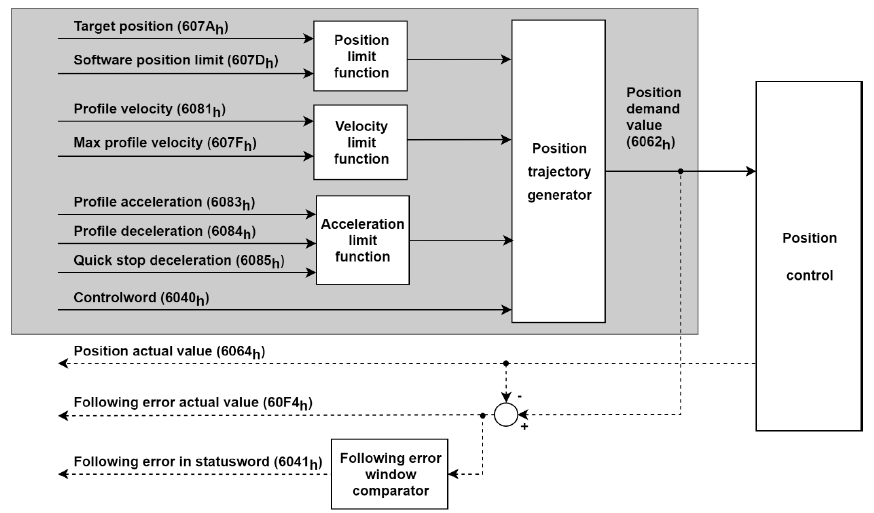
PP mode
Interpolated Profile Position模式和Cyclic Synchronous Position模式,兩者的差別在於更新目標位置的週期並不一樣,CSP模式每個通訊週期都需更新目標位置的命令,而IP模式則在每個插補週期(=通訊次數*通訊週期)時更新目標位置的命令,而在到達下一個插補週期之間,從站會在每個通訊週期中進行到目標位置間的位置插補。
Cyclic Synchronous Position, Velocity, Torque模式(CSP, CSV, CST),則完全交由主站來規劃到達目標位置、速度以及轉矩的內插命令值,與從站之間,透過PDO物件,在每個通訊週期完成命令與回授資訊的交換。大多應用上,若需經由主站進行的多軸同動控制時,因軌跡規劃的部份會實作在主站內,而多會採用此週期同步控制的模式。
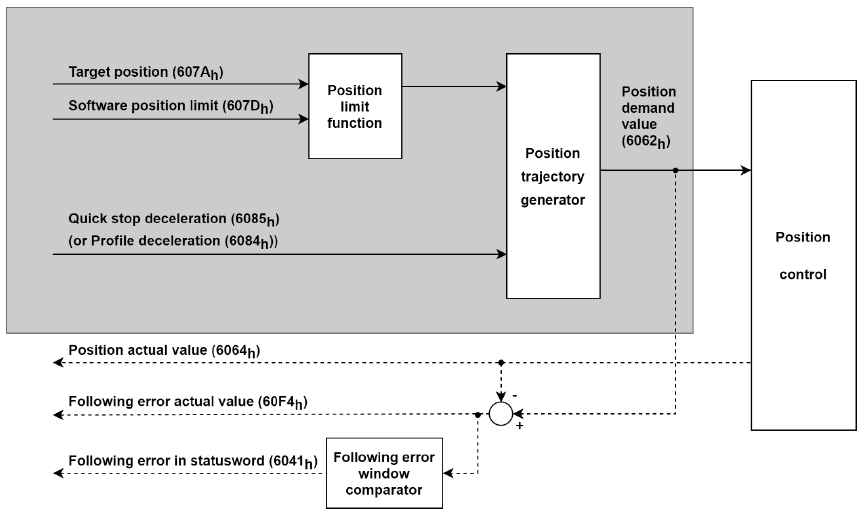
CSP mode
Homing模式(HM)即是從站找尋原點的方式,當中可設定原點復歸的速度(包含找原點開關與軸index訊號)、加速度、原點偏移量等;提供包含找正負極限、原點開關、軸index訊號等,在應用上常見的的原點復歸方式。
*註:在CANopen通訊協定下定義了設備的物件字典(Object Dictionarry),裡面包含了SDO(Service Data Object, 服務資料物件)與PDO(Process Data Object, 程序資料物件),兩者之間的差異,PDO是即時性的資料交換,定義在PDO mapping裡的資料會保證在一個通訊週期內完成主從站的資料交換通訊,但PDO mapping能夠使用的資料空間較為有限,通常需因應控制模式與實際需求進行調整。而SDO是用於物件字典內的資料交換,依實際傳遞資料的大小,可能會需要多次的通訊週期才會完成一次的資料傳遞,用於非即時性需求的資料交換。
Picture Source: HIWINMikro E1 Series Servo Drive_EtherCAT(CoE) Communications Command Manual