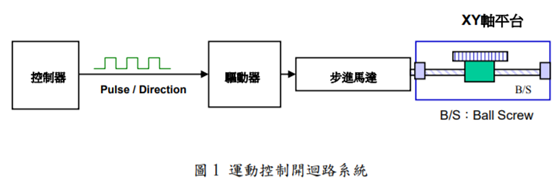
運動控制系統在工業界上的應用非常的廣泛,一般來說,運動控制系統粗 分為開迴路系統與閉迴路系統以及完全型閉迴路系統如圖 1 圖 2 圖 3 所示。
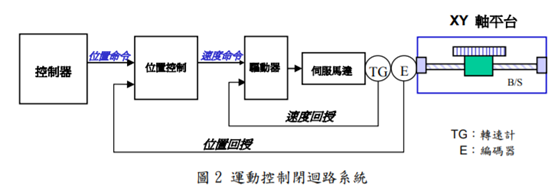
一個 不含回授元件的控制系統,其輸出信號不會影響系統的輸入信號,稱為開迴路控 制系統(Open-loop control)而為了使系統能更準確的控制,於是加入回授元 件,讓輸出信號經由回授元件產生回授信號,然後再與輸入信號於比較器做比較 而得到誤差信號,以作為控制器的修正輸入;整個系統將持續此一回授動作,直 到達成原先預期的輸入目標值為止,此即閉迴路控制系統(Closed-loop control system)。
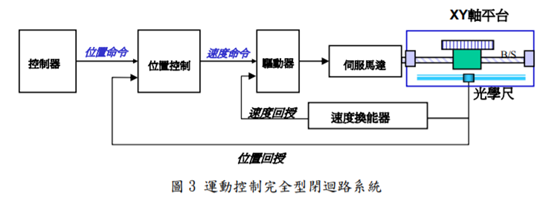
閉迴路控制系統的優點是:由於回授的加入使得系統對外來的雜訊干 擾及內部元件參數的變動影響顯得較不敏感,亦即可增進系統控制的準確度。另 外完全型閉迴路系統為閉迴路系統的一種,是將回授信號透過光學尺等量測元件 直接由受控體經轉換器(速度換能器)拉回驅動器,此一作法是讓精確度更高。
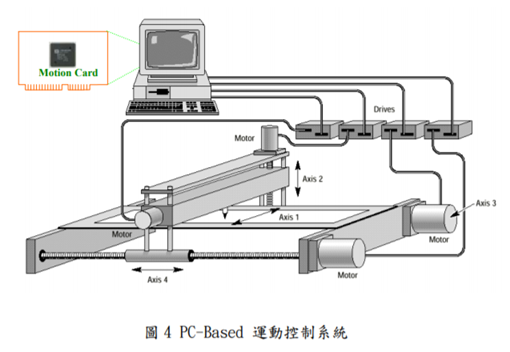
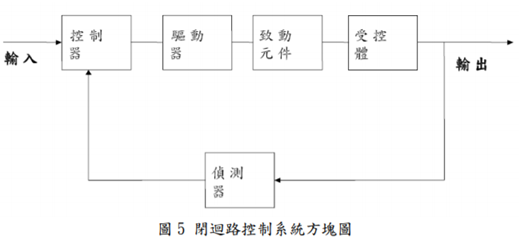
以 PC-Based 為主的運動控制系統而言包含許多的部份,除了運動控制卡(包含
Motion Control ASIC)外,還需要有回授解碼電路、馬達驅動電路、周邊輸出 入電路及控制軟體等等整合而成如圖 4 所示。因此完整的閉迴路運動控制系統是 包括由控制器(Controller)、驅動器(Drive)、致動元件(Actuator)、受 控體(Plant)、偵測器(Sensor)所組成如圖 5 所示。
運動控制系統通常可針 對使用者的需求來設計,以控制受控體的位置、速度、加速度或運動軌跡。控制 馬達的轉軸位置即是定位控制的唯ㄧ目標,現今的定位控制已從過去的釐米(mm) 等級提升到微米(μm)等級甚至是奈米(nm)等級,隨著定位精準度的提升,運 動控制器的設計也越來越困難。因此機械結構本身以及致動器、感測器的選擇與 高等控制法則相互配合下才能達到其要求的定位精度。
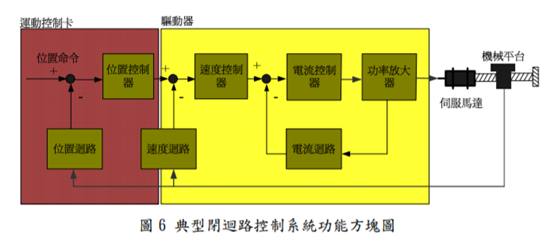
一般而言,運動控制卡計 算從 PC 端所下達的位置命令,以及由編碼器所回饋的實際位置,經過位置控制 器(position controller)的演算與補償後,產生所需要的速度命令並傳給下 ㄧ級的速度控制迴路(velocity controller)。
速度命令通常以電壓的形式輸 出,所以不同的電壓代表著不同的轉速命令,而兩個關係是一個線性的關係。當 伺服馬達接受速度命令後,會再與編碼器所回饋的速度命令作耦和,產生所需的 電流命令當做下ㄧ級電流控制迴路(current controller)的輸入。其間的關係 可由圖 6 的典型閉迴路控制系統功能方塊表示。
資料來源 : 林家慶 智慧型運動控制晶片介紹