
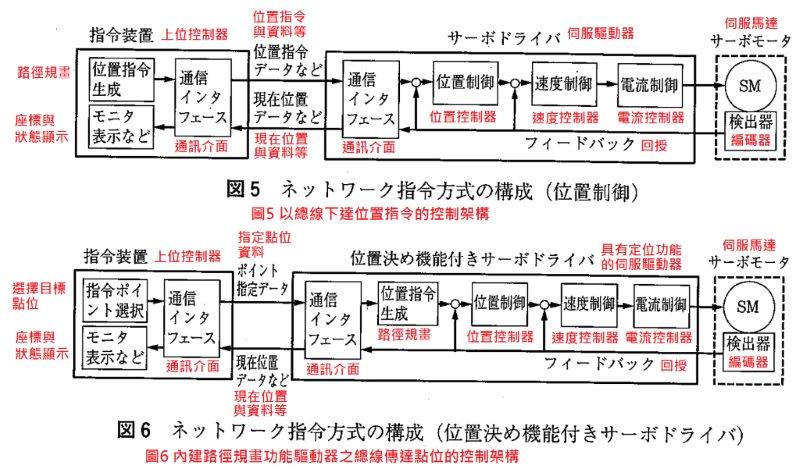

上位(運動)控制器產生的指令,透過總線介面於每一個通訊週期把指令送給伺服驅動器,這樣的方式是最直覺的控制方法,前述方法具體而言有採用位置指令,速度指令,扭力指令等不同的控制方式。
另外也有一種做法,就是如果驅動器本身具有產生位置指令(也就是路徑規劃)的能力,也可以透過總線的通訊下達運動指令,這樣的做法通常會在驅動器中預先存好許多位置點位等運動資訊,等到上位控制器透過總線網路通知驅動器啟動哪一個點位,則驅動器即進行運動定位。這樣的好處是,總線技術本身不需要像最開始所敘述那種位置指令,速度指令,扭力指令需要非常即時的通訊手段。具體而言通訊週期不用非常細密。
圖5所示者為以總線下達位置指令的控制基本架構。
圖6所示者為採用內建路徑規劃功能的驅動器時,總線傳達運動點位控制的基本架構。
串列通訊或總線式運動控制方式具有下列特徵:
1. 指令的解析度依存於指令資料長度/指令單位,且通常都具有運動控制上充分的指令解析度。
2. 具有CRC之類的錯誤檢查機制,可以抵抗noise,達到較長的通訊距離。
3. 天生受到通訊週期延滯的限制想做到高速響應困難
4. 各家總線互不相容,選擇控制器與驅動器的自由度變低。
串列通訊或總線式運動控制方式有下列幾種分類:
1. 串列通訊
●如MODBUS
●主要用以連接具有定位功能的驅動器
2. Field Network總線網路
●如CC-Link, DeviceNet, ProfibusDP
●主要用以連接具有定位功能的伺服驅動器
●比第三類Motion Network的設備豐富程度更高,更普遍
3. Motion Network運動網路
●如SSCNet, MECHATROLINK/SERCOS等
●主要使用於位置控制,也可以用速度控制,扭力控制
●主要適用於高速度高精度多軸的應用
●大部份具有多軸間同步的功能,可以容易達到高精度的同步與插補
●各家公司一開始獨自開發的網路居多,後續才公開技術的也有,與第二項的Field Network比起來比較難找到豐富的連接設備。
像本文附的照片裡面的各個系列的驅動器,就具有EtherCAT的總線功能,它屬於一種較快速的總線技術, 可以支援上述的Motoion Network的即時運動控制, 當然也可以支援上述第2類的Field Network比較緩和速度的運動控制通訊需求。
通常的位置應用採用250μs的通訊週期進行位置或速度或扭力(電流)模式下的各種控制。