
在驅動中了解凸輪的原理可以有助於理解驅動器越來越多的電子凸輪的應用。這裡來談談凸輪的原理。
相較於齒輪箱傳導速度或扭力而言,凸輪將一線性運動模式(通常是旋轉運動,特別是等轉速的運動)轉換成非線性的運動模式。最典型的凸輪運動轉換就是輸出一個上昇下降的路徑,而該路徑輸出為旋轉運動輸入的函數。這樣的函數關係描述了凸輪驅動系的主要任務。
輸出的非線性運動與輸入的馬達旋轉運動相互同步。舉例而言上死點永遠在運動週期中的同一個位置時到達。
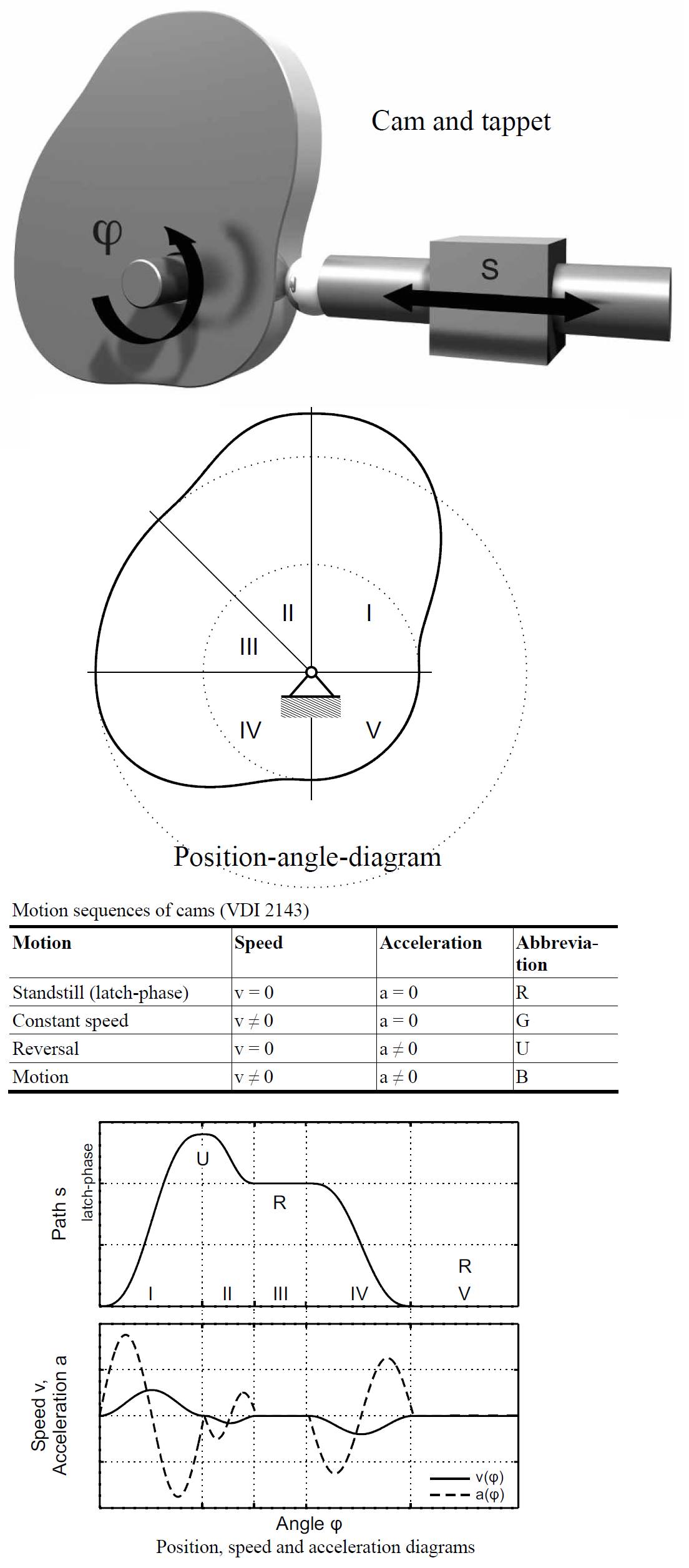
輸出的運動特徵參考德國VDI標準,依照不同的速度條件與加速度條件分為四種交界點: R, G, U, B。請看附圖裡面的表。R:靜止; G: 等速; U: 折返; B: 運動。
界於各個交界點之間存在著不同的運動規則,而串成一個曲線函數y=f(x)。圖示的凸輪與從動件含有一個折返點(第I到第II區),還有兩處靜止區(第III與V區),折返點也對應到上死點,而靜止區從動件不運動。速度與加速度可以用微積分算出來。
分析速度與加速度特性可以得知產生的力量還有機構的激振狀況。本圖所示的例子乃經過優化,對於機械產生的激振很小。
傳統的凸輪機構的不方便在於,具有實體機械零件,當運動需求改變時就要重新設計不同的零件,耗時,應用彈性低,價格問題。而使用電子凸輪之驅動器功能時,就沒有這些問題,在驅動器裡面的軟體就可以達到類似凸輪的運動輸出,而且彈性高,改變運動需求時不需要加工新的機械零件,切換不同製程的設定時間大幅縮短。
註: 德文中, R為Rast; G為konstante Geschwindigkeit; U為Umkehr; B為Bewegung。