
這個話題也許稍微嚴肅了一點,但是卻是蠻重要的題目,所以特別拿出來分享一下。還是一樣借用教科書裡面的圖片來說明。
馬達通常有三相線圈,對各該線圈通以各相差120度相位差的電流並隨著時間換各相的電流的這個動作叫做換相,英文叫commutation。而換相這個動作就會給馬達扭力,轉動馬達,換相的頻率越快,基本上轉動就越快。而換相時電流的振幅越大,扭力也越大。對於伺服馬達而言具有回授位置訊號,由編碼器提供訊號,換相計算電流時也要考慮轉子回授的位置,否則扭力效率會不好,甚至空有電流而產生不了扭力。
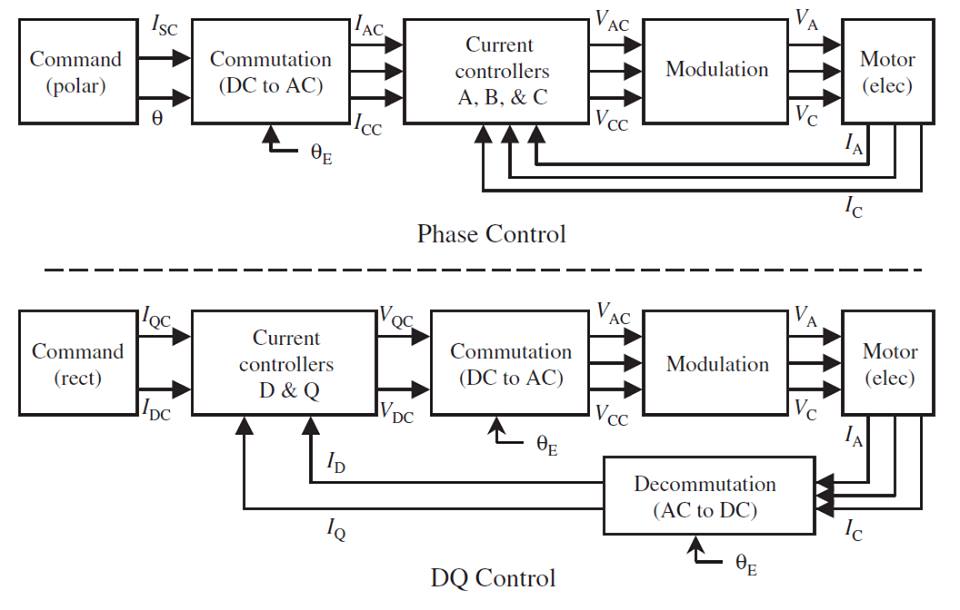
了解了這個基本,就大概知道可以如何控制馬達,圖中上半最左邊的是扭力指令I_SC也就是電流振幅指令,其下有個theta其實通常不需要特別給這指令(可用來做弱磁控制,暫時不考慮它),然後Commutation方塊就是計算核心中的三角函數運算,用來產生前述相差120度的三個電流(A, B, C或稱U, V, W),計算的時候也取用了theta_E轉子位置訊號。接著後面的是電流控制器含調變器,構成一個閉迴路系統,可以看到電流回授訊號由馬達線圈量測回饋入電流控制器。
I_SC乃是依存於前端的路徑規畫器以及位置/速度控制器所輸出的扭力/電流指令,透過commutation換相方塊往後傳遞,如果以"變上加變"來形容這樣的一串信號,不知道大家可否體會,也就是第一個變化量要經過第二個變化的洗禮,然後才送到電流控制器去。
圖的下半也就是DQ control的部份(有人稱vector control或FOC, field oriented control),相較於圖上半的phase control的I_SC,其等效的指令信號就是圖下半左邊的I_QC,同樣地先不考慮弱磁控制所以I_DC都是0(等效於上半圖的theta指令為0)。
DQ control的電流控制迴路其本質就少了一層的變,只有指令扭力/電流在變; 在DQ control中commutation的方塊位於電流控制器的後面,因此對於電流控制器而言變量就只有一層,因為第二個層次的變量被包入commutation裡面了,可能有點難理解,把換相(commutation)藉由公式從固定座標系轉到旋轉座標系(定子座標轉到轉子座標),所以本來看起來一直動來動去的物理量,變成不太動了,而電流控制器只要針對這個不太動的物理量下手去控制就可以,減輕了控制器的負擔。可能難理解,再換個講法你們聽看看:對於DQ control當扭力指令固定,轉速也固定的應用,電流控制器要負責的只有把I_QC照顧好,維持一個固定值(DC直流量)就任務完成,不用管變動的電流控制,任務被大幅減輕了。
從結果來說phase control在高轉速時的扭力控制會衰減,DQ control在高轉速時扭力較不衰減。而DQ control可以輕易辦到,都是拜數位計算機運算能力強大且便宜而促成。因為其中含有decommutation與commutation兩個運算轉換(前者用Clarke加Park轉換; 後者則用逆轉換)。