
RV-E型減速器
1、原理
RV減速器:
用於轉矩大的機器人腿部腰部和肘部三個關節,負載大的工業機器人,一二三軸都是用RV。相比諧波減速機,RV減速機的關鍵在於加工工藝和裝配工藝。RV減速機具有更高的疲勞強度、剛度和壽命,不像諧波傳動那樣隨著使用時間增長,運動精度會顯著降低,其缺點是重量重,外形尺寸較大。
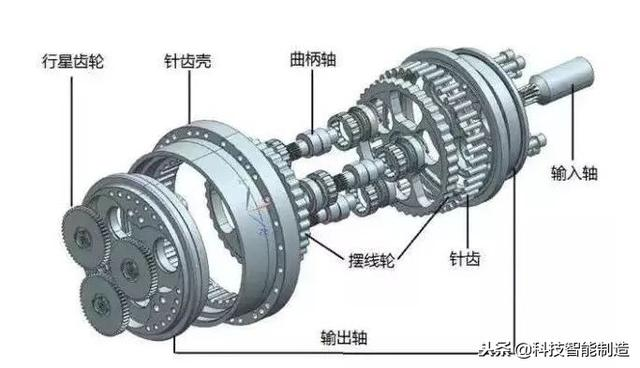
RV減速器是由擺線針輪和行星支架組成,以其體積小、抗衝擊力強、扭矩大、定位精度高、振動小、減速比大等諸多優點被廣泛應用於工業機器人、工具機、醫療檢測設備、衛星接收系統等領域。
RV減速器的殼體和擺線針輪是通過實體的鋼來發生傳動的,因此承載能力強。而諧波減速器的柔輪可不斷發生變形來傳遞扭矩,這一點決定了諧波減速器承受大扭矩和衝擊載荷的能力有限,因此一般運用在前端。

2、優劣勢
RV減速器剛性好、抗衝擊能力強、傳動平穩、精度高,適合中、重載荷的應用,但RV減速器需要傳遞很大的扭矩,承受很大的過載衝擊,保證預期的工作壽命,因而在設計上使用了相對複雜的過定位結構,製造工藝和成本控制難度較大。RV減速器內部沒有彈性形變的受力元件,所以能夠承受一定扭矩。RV減速器的軸承是其薄弱環節,受力時很容易突破軸承受力極限而導致軸承異常磨損或破裂。在高速運轉時這個問題更突出,所以RV減速機的額定扭矩隨輸入轉速下降非常明顯。
3、減速器之間是否存在取代關係
正方觀點:
RV減速器較機器人中常用的諧波傳動具有高得多的疲勞強度、剛度和壽命,而且回差精度穩定,不像諧波傳動那樣隨著使用時間增長運動精度就會顯著降低。所以許多國家的高精度機器人傳動多採用RV減速器,因此,RV減速器在先進機器人傳動中有逐漸取代諧波減速器的發展趨勢。
這些產品在某些型號上確實存在替代關係,但這幾類減速器只能實現部分替代。絕大部分情況下,各類減速器很難實現替換,比如在速比方面,諧波和RV的速比都要遠遠大於行星,所以小速比領域是行星的天下。當然行星的速比是可以做大的,但是很難去替換諧波和RV。又比如剛性方面,行星和RV的剛性要好於諧波,在體現剛性的使用工況下,諧波很難有好的表現。
諧波減速器的特點是輕和小,在這方面,行星和RV卻很難做到。所以各類減速器只能在一部分情況下可實現替換,但是如果一種產品全方位替換另一種產品是不現實的。
反方觀點:
各類減速器之間不能相互取代,而是一種互補的關係。
