
傳統的運動控制上最常見的就是串接位置回路, 速度回路與電流回路的做法最普遍, 本文簡單介紹如何應用現代控制理論合併速度觀測器的方式, 降低運動控制時機械結構震動的目地。
一般而言,增加回授的增益可以提升機械動作的響應性能且更好地抑制外來的干擾(如摩擦等),但是受控的機械結構本身經常具有結構太弱引發的共振頻率,特別是例如50~200Hz左右的共振頻率,常用低通率波器與陷波濾波器解決,但是加大增益還是有機會讓控制迴路發散,無法控制, 因而導入震動抑制的控制功能。
抑制震動控制的原理
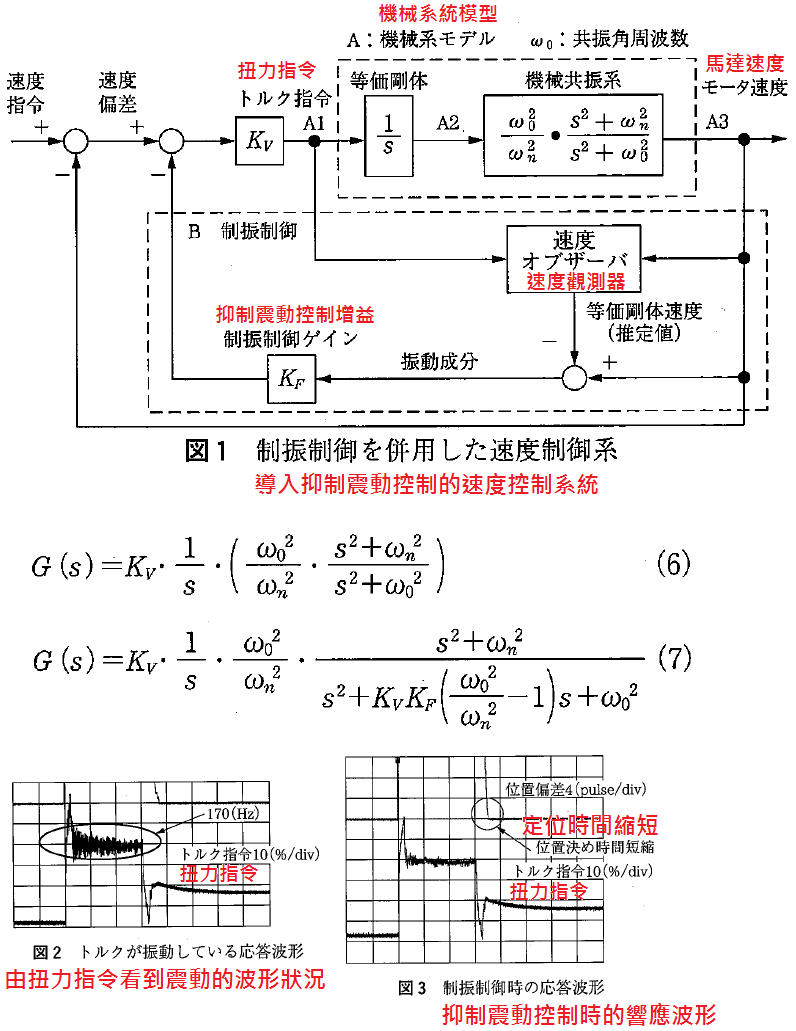
圖1上方標示A的範圍表示包含了馬達以及受控的機械結構系統的模型。標B的則為抑制震動控制的方塊。
圖中A2點為等價剛體速度這樣的一個假想信號,實際上並不存在且無法量測得到此信號。將A3點馬達速度與A1點扭力指令饋入速度觀測器可以估測等價剛體速度,將馬達速度減估測得的剛體速度即為震動成份。
圖1中B的範圍是抑制震動控制器,附圖裡面(6)式表示沒有抑制震動控制時的: 馬達速度對速度偏差的轉移函數。括弧中靠右的s的2次系分數式為機械共振的轉移函數(但將震動的阻尼假設為0以茲簡化)
為了容易理解制震原理,直接把A2點的等價剛體速度拉到速度觀測器輸出那一個地方去, 用這樣推導出新的: 馬達速度對速度偏差的轉移函數得到式(7)
如此一來,從(7)與(6)可以看到,機械共振的轉移函數分母多了一個s的一次項, 依照控制系統的基本經驗或知識,這個相當於阻尼成份的項,所以只要增加K_F(制震增益)就有增加阻尼的效果,讓機械控制系統變穩定,也就減少震動。
實驗結果
附圖最下面展示了使用前與使用後的效果圖。該案例為一個使用滾珠螺桿的定位裝置,圖2為沒有打開制震控制,圖中可以觀察機械結構本身不夠剛強導致的170Hz的震動。打開制震控制則觀察到如圖3明顯降低震動的結果。
藉由導入制震控制可以把原本速度回路的增益K_V由110Hz增加到145Hz,並將定位時間由703ms降低為689ms。