
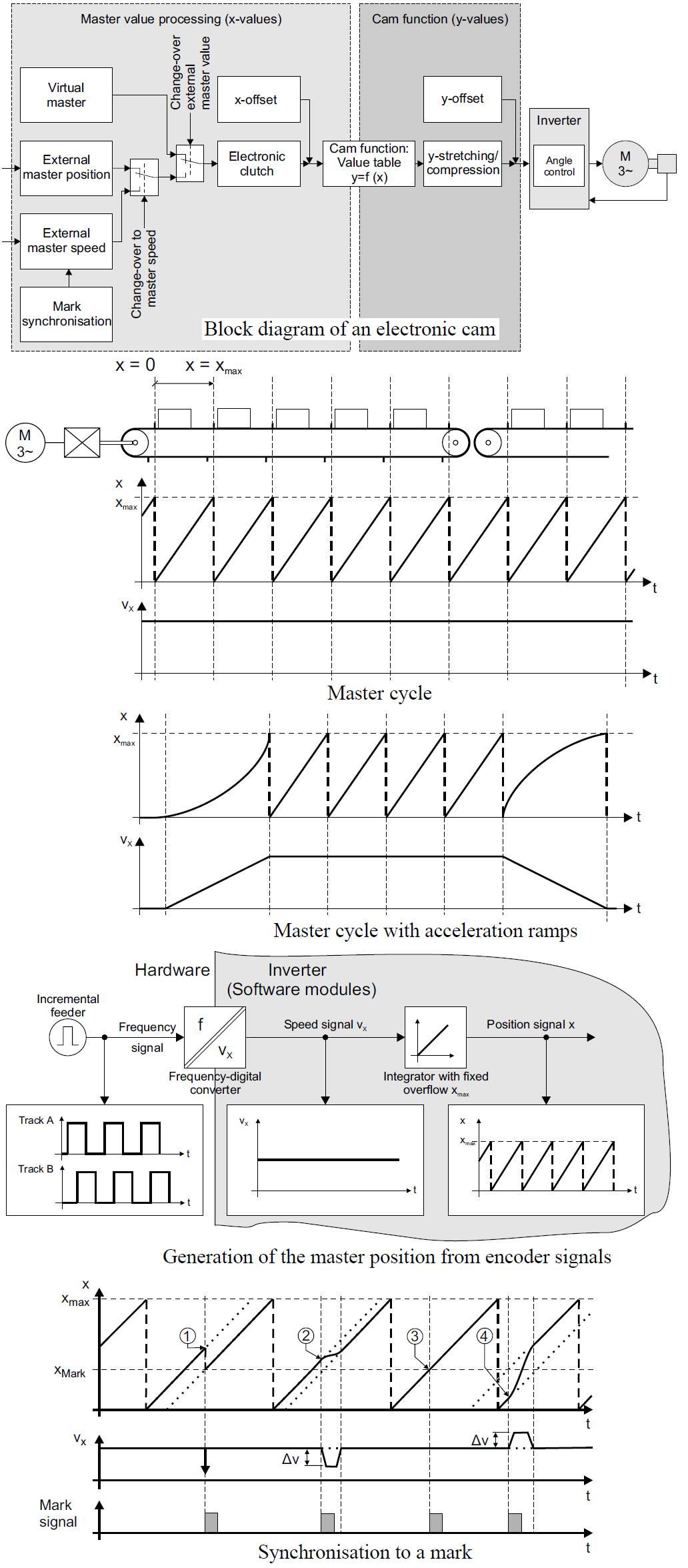
圖中顯示了一個完整的驅動器電子凸輪功能的方塊圖。主要包含有:
●計算凸輪函數的輸入值(master值)
●以數學函數實作的凸輪曲線
●後處理,對凸輪輸出加以offset(平移)或變形(伸或縮)
本文先探討其中的第一點master值的計算。
凸輪輸入值的計算(x position的計算)
輸入值相當於傳統機構中的長旋轉軸的角度。其0~360度的旋轉角在電子凸輪應用中轉換成相對應於0~x_max的範圍。等速運轉時,位置的圖形看起來就像master cycle圖裡面的鋸齒曲線。
虛擬主軸訊號(virtual master)
某些情形下,機台運作不依存於外來的條件,因此就必須在控制迴路裡面自己準備一個虛擬主軸的訊號。這個任務可以由專屬的控制器負責也可以交由驅動器來計算。這些計算除了產生master cycle訊號外也負責:
●修改速度v_x,藉由改變加減速來達成
●負責讓位置停在某些特定點,如週期的最終位置x_max的地方
●單一週期的運動操作(從0到x_max)
●前進與後退之吋動功能以利導入與調整機台順利完成
●提供手輪功能以模擬長旋轉軸
●必要時即時而平滑地將虛擬訊號切換到實際外來指令或切換回來
Master cycle with acceleration ramps圖中顯示了具有加減速度區段與等速區段的虛擬主軸訊號。圖中第一個週期對應到加速度區段,第六個週期則為減速度區段,最後停止於x_max的位置。
由外部送來的編碼器訊號產生x position
有時候工件移動部的速度來自一個安裝在輸送帶的編碼器,通常它只提供增量訊號而非絕對座標。此時就必須採用如圖中(Generation of the master position from encoder signals)架構的方式產生x position。首先先從A/B相方波的編碼器訊號計算速度值然後由積分器產生位置訊號。就這樣,鋸齒狀的位置波型就被產生了。為了要與機械運動週期互相一致,這裡有兩件程序被考慮:
●起動機器前先設定正確的起始座標於積分方塊中。
●每個運動週期會從傳感器送來一同步訊號,必須調整與之同步。
為什麼需要傳感器提供同步訊號,因為當工件被擺放在輸送帶上面的時候,有可能擺放的位置被提前或落後了,如此會導致後製程凸輪在壓合的時候的不精準甚至失誤。而應用該同步訊號可以精準地在一個機器週期中定出工件的位置,通常這個訊號都會饋入驅動器的touch probe輸入埠以精確閂鎖住位置。請看最下面的那張圖,最下面標示Mark signal的信號為傳感器的輸出分別對應到四個不同情境的位置:
(1)初始化: 只適用在開機起動的初始化把x_position調整到傳感器對應到的正確座標。
(2)傳感器送進來觸發的時候內部計算位置超前所以必需延緩處理,降低速度一小段時 間,讓x_position落後以符合傳感器提供的真實工件位置。
(3)內部x_position與外部訊號相符,無須修正。
(4)內部x_position落後必須提升速度一小段時間追趕真實位置。