
如何判斷定位系統的好壞,工程上採用量化的方式來描述一個系統,一般常聽到的名詞有“精度”與“重現精度”,其實這些指標都與統計有關係。
評估的時候啟動定位系統以預先選好的方式來回運動,停留在各取樣位置,直到取樣資料達到規劃的規模才停止運動。舉例而言:例如每隔10mm停留一次,往前走20次然後依序再以相同步幅回來,如此來回三次。而資料的取得通常採用精度較高的位置量測系統來取樣,分別在各個停留點將位置記錄下來。雷射干涉儀就是常用的資料取樣用高精度量測系統。
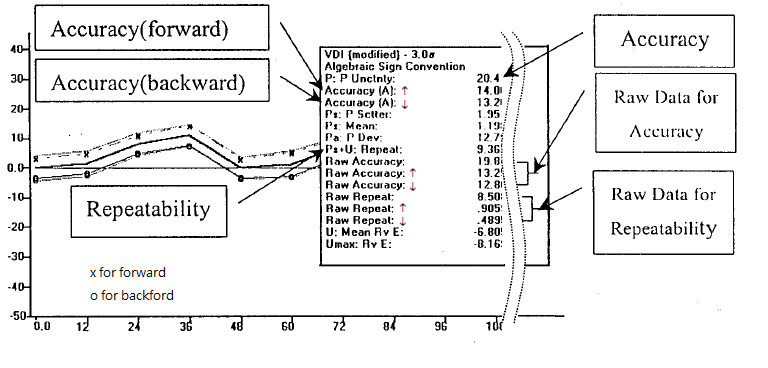
在每一個停留位置都擁有複數個前行取樣值與同等數量的後退取樣值,區分前行與後退的理由在於,一般的機械結構都以不同的程度隱含了背隙的特質,藉由後退的取樣平均值減前行的取樣平均值就可以得到各個目標停留位置的反向間隙(Reverse Error又名Ui Rv E),而把這許許多多不同位置的反向間隙平均起來就得到一個指標U: Mean Rv E,暫且稱之為平均反向間隙。有了這個指標,就可以比較客觀地評斷該定位系統的背隙有多嚴重。一般而言,若前行的方向為正方向,通常背隙多為負值。
有一個重要的指標叫做Ps+U: Repeat俗稱重現性,這個指標其實是背隙計算的延伸,它在背隙的量之上,多加入了標準差的統計估測。把不確定性的因素以統計手法加入評估裡。讓指標更具實用價值。簡化的理解方式可以說重現性等於背隙量加六個標準差。
最後來講P: P Uncertainty俗稱精度(Accuracy),在每個停留位置都有前行取樣值,求其平均,再加入三個標準差,得到在某個停留點的上疆界(upper bound);同樣地針對後退取樣值,求平均,減掉三個標準差,得到在某個停留點的下疆界(lower bound)。讓我們把所有上疆界點依序繪圖描點在相應的XY座標圖上,X軸是停留的目標座標,Y軸就是上疆界值,把這一系列不同停留座標的上疆界點連起來,變成上疆界曲線,讓我戲稱為上國界好了;同理也可以用各個下疆界值畫出下國界。精度的計算就是把上國界最北邊的點找出來,還有下國界最南邊的點也找出來,北邊減南邊的數值就是精度。
今天講的這些,是參考德國標準VDI3441,我嘗試用比較簡易的解釋方式表達而且簡化了不少細節,希望對大家的理解有幫助。順便提一下,俗話裡面常常聽到人說:精度正負幾myu,其實如果嚴格按照前面的定義,這是一個不太科學的講法,因為從國界最北到國界最南只能算出一個數值,並沒有正多少或負多少的概念。精度是一個永遠為正數值的指標。指標越大越不好。
也可以參考日本JIS B6190-2標準: 工作機械試験方法通則−第 2 部:数値制御による位置決め精度試験。