
今天來聊聊運動控制中的工業通訊industial communication system, 大陸把它稱之為總線, 台灣以前曾經稱為匯流排,英文也會說field bus system.
在通訊科技尚未像今日這麼發達, 沒有網路的時代工業設備之間只能一對一的拉線,它的好處是非常即時,壞處是配線成本高,距離受限,空間受限,擴充性限制, 時至網路無遠弗屆的今日,工業上也逐漸將連線科技應用上來, 訊號的即時性可以透過較快的串列通訊技術以彷彿實時的方式高頻率交信解決即時性的問題, 也達到省配線, 提高系統擴充的能力.
借由通訊功能讓工業應用中的資訊得以快速流通, 它主要的內涵有工廠設備排程,機台控制訊號傳遞,製程進度的回報,機器狀態的監控,量測數據的記錄,除錯的進行.
再更低階的現場總線(所謂低階意指靠近工件, 設備)之通訊內容,可以大約分兩個部份:
1. Process Data (製程數據): 舉例而言電壓,電流,距離,角度,壓力,溫度,速度...等
2. Service Data (運作參數): 例如設定運動模式,目標轉速,休息時間,組態變更...等.
前者通常隨時佔住通訊頻道,讓線路一直充滿大量數據,來回交信; 後者則常為間歇性的傳遞, 以事件觸發才啟動通訊, 不會長時間占用通訊管道。
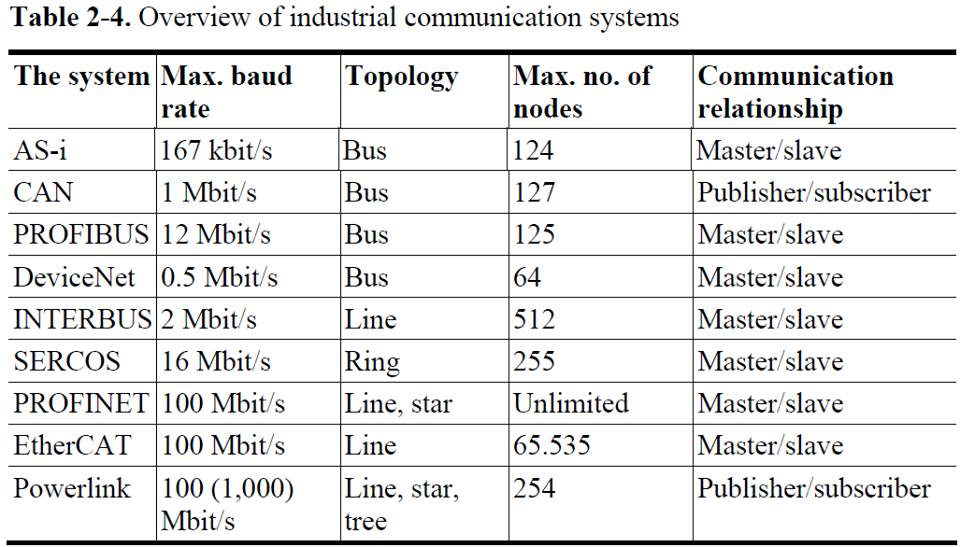
隨附的圖表,顯示的歐洲近年來的幾個重要工業通訊的格式。表中羅列了各格式的速率,配線拓墣,支援的最多節點數,通訊的關係架構。
CAN最早是Bosch為了汽車上的用途開發,但現在發展到車子以外也很常見。原文為Control Area Network。運動控制上也有發展為CANopen。
Profibus, Profinet為西門子的發展,勢力蠻大。
DeviceNet有架構在CAN的案例,物理層共用CAN的技術,但軟體上有特別的協定。
Sercos只用在伺服控制技術。
EtherCAT為德國Beckhoff的發明,大量受到全世界工業界的採用,使用於慢速與高速通訊,也適用伺服控制稱為CoE (CAN over EtherCAT)。
Powerlink為奧地利B&R的發展,也是基於Ethernet的技術但不像EtherCAT那麼受關注。
表中沒有列到日本的技術,如安川Mechatrolink,三菱SSCNet,松下RTEX等; 美國mei的SynQNet,美國Firewire。