工作原理 步進電機是一種將電脈衝轉化為角位移的執行器件。通俗一點講:當步進驅動器接收到一個脈衝信號,它就驅 動步進電機按設定的方向轉動一個固定的角度(及步進角)。他的選擇是固定的角度一步一步進行,可以通過 控制脈衝個數來控制角位移量,從而達到準確定位的目的;同時也可以通過控制脈衝頻率來控制電機轉動的速 度和加速度,從而達到調速的目的。 伺服馬達內部的轉子( rotor) 是永磁鐵,驅動控制通過定子 (stator) 線圈通電形成電磁場,轉子在磁場的作用下 轉動, 同時馬達自帶的編碼器反顯信號傳回給驅動器,驅動器根據反顯值與目標值進行比較,調整轉子轉動 的角度,伺服馬達的精準度決定於編碼器的精度。一般用於 Arduino 小型項目的微型伺服馬達內置及編碼器, 只需外接電源及信號便可運作。
轉動幅度 步進馬達可正向或反向回轉旋轉,旋轉角度並沒有限制。 用於 Arduino 小型項目的微型直流伺服馬達一般工作轉動角度為正+180 至-180 度。 控制方式 步進馬達是通過控制脈沖的數量控制轉動角度,一個脈沖對應一個步距角。 伺服馬達是通過控制脈沖時間的長短控制轉動角度。

所需的工作設備和工作流程 驅動步進馬達需要供電電源(所需電壓由驅動器參數決定),脈沖發生器;驅動器(驅動器設定步距角度,如設定 為 0.45 度時,當馬達接收一個脈沖時會轉動 0.45 度);驅動步進馬達一般需要兩個脈沖,分別為信號脈沖及方向 脈沖。 同樣地驅動伺服馬達需要開關式供電電源,其工作流程是一個電源連續開關,在連接伺服馬達作驅動。 低頻特性 步進馬達最低速時容易出現低頻振動現象,振動頻率與負載和驅動性能有關。 一般交流式伺服馬達運轉非常平穩,即使在低速時也不會出現振動現象。
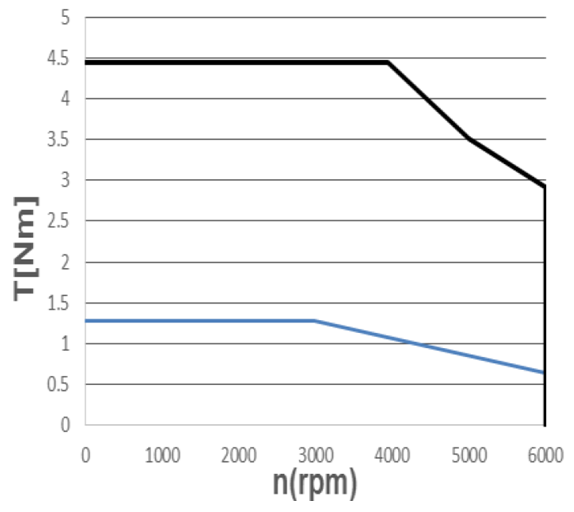
輸出力矩 步進馬達的輸出力矩隨著轉速升高而下降,並且在較高轉速時會急劇下降, 所以其最高轉速一般為 300~600rpm ,並不具有過載能力。 交流式伺服馬達維均衡力矩輸出, 即使在額定轉速上限(2000~3000rpm)均可以輸出額定力拒,不受轉速影 響,並附有較強的過載能力。 以上資料有助於創作階段決定那款馬達驅動比較合適,例如一般機械臂轉動角度小於 180 度,並對轉動角度正 確率要求比較高,所以直流伺服馬達是比較適合的。又例如在兩軸工作台(XY Table),其工作需要氣件持續移 動特定長度(即馬達轉動多於 360 度),並且不需要均衡力矩,所以一般會選擇使用步進馬達作為驅動器件。