
這裡要說明的是應用在伺服馬達點對點應用的一些小技巧。在伺服驅動器的運動過程中,有一個到位訊號(In-Position),它可以輸出給驅動器之外的設備,它的狀態值為[真 | 假],多透過數位輸出(Digital Output)的控制腳往外傳遞。有些驅動器會稱之為COIN,我在猜也許與英文的coincide這個字有關聯。
所謂到位訊號是,當驅動器的編碼器回授訊號與指令位置一致的時候就可以視為到位的意思。因為伺服控制的最終目的就是要把馬達的位置帶到目標地,而在驅動器裡面的伺服回路的工作就是達到這個任務。
實務上,在伺服驅動上回授位置值只要接近目標位置一個夠小的距離,就會認為已經到位。通常這個夠小的距離乃是以一個到位框的參數來判斷,誤差小於該範圍則到位狀態就為真。有人稱之為Target Radius有人則稱為定位框, 也有的驅動器存在Pt522號參數。
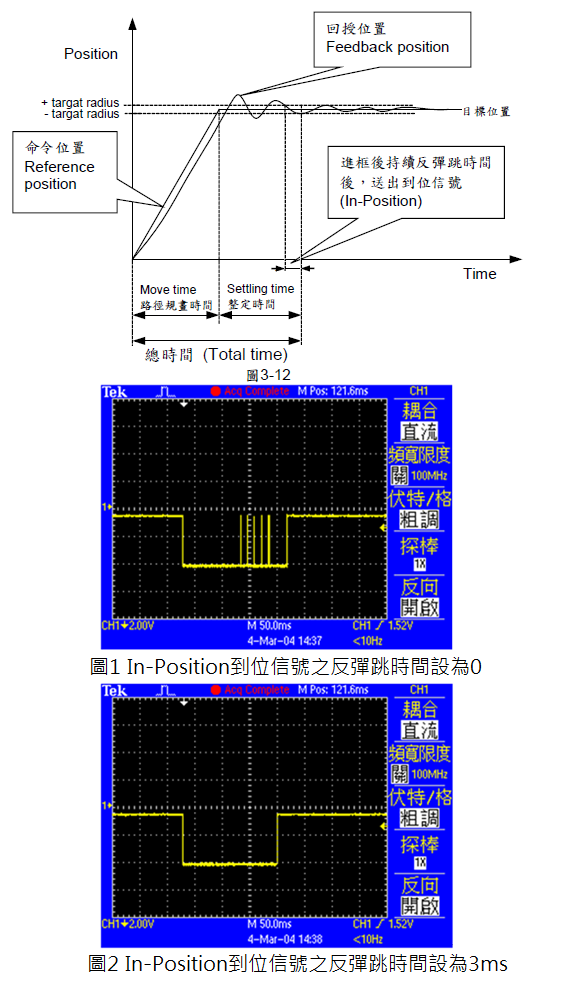
基於機械結構的剛性設計組裝狀況不一,在伺服定位的過程快要完成的時候有可能會產生晃動,也就是一下子到達目標,一下子過頭,一下子修正到位,如果從附圖3-12看其中標示整定的段落就屬於這個現象的圖形。在整定的過程中前述的到位訊號有可能在真|假之間彈跳,忽而進框,忽而出框,如果上位控制器收到這個訊號會如此跳動,其實就會造成機台運作精度不理想,為了解決此問題,有一個反彈跳的功能就可以用來提升精度,設定的方式如下:
1. 先把反彈跳時間設為0
2. 以示波器或PC上伺服驅動器的圖形介面觀察定位運動的到位訊號
3. 當機台到位時會晃動,則會觀察到動作完成時有如圖1的好幾根Spike(突波)狀的到位訊號,圖1為例,可以看到5根突波。表示到位信號不穩定,機台有晃動。
4. 仔細記錄各個突波的寬度各為多少時間,例如各寬為1.5ms, 1.4ms, 1.4ms, 1.3ms, 1ms, 記錄最大值此例為1.5ms
5. 將反彈跳時間(Debounce time)參數, 例如Pt523號參數設定比1.5ms大,例如3ms
6. 再觀察運動就可以看到沒有突波,如圖2
藉由這樣的功能的參數設定,可以看到驅動器就可以輸出穩定的到位訊號,上位控制器如PLC等等收到的訊號就不會有彈跳,而且機台在實施加工也好,檢查也好,也就可以更準確。