
猜猜看一個運動控制的圖形如果長這樣,你覺得發生什麼事了呢?
曲線的物理量分別是
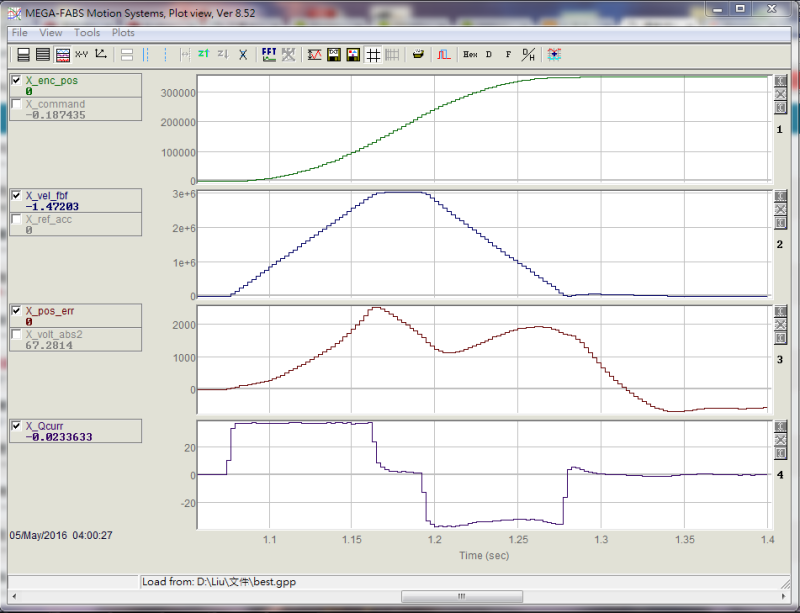
1. 運動的位置
2. 移動的速度
3. 跟隨誤差
4. 驅動器輸出的電流
B0
2016年 05月10日 23:07
Liuct2 寫:
猜猜看一個運動控制的圖形如果長這樣,你覺得發生什麼事了呢?
曲線的物理量分別是
1. 運動的位置
2. 移動的速度
3. 跟隨誤差
4. 驅動器輸出的電流
Liuct2 寫:Ichirolu 您好,
1. 上位控制器送來的運動命令在這個案例並不存在,也就是沒有上位控制器,沒有脈波命令,沒有正負10V的命令。單獨是智慧型驅動器自己運作而移動馬達。
2. 伺服增益的確是重點之一、但是在討論增益之前、還有一個議題擋住了路、再想看看。
3. 雜訊也應該不是、看看路徑還算漂亮、速度也不醜、所以應該不會是雜訊的問題。
4. 驅動器沒有故障、移動速度最快的地方其實已經實際上跑到3m/s有點快了哦。沒有壞掉。不過提示一下跟驅動器的某個設定有關係。
您願意再挑戰看看嗎?
Liuct2 寫:Ichirolu 您好,
1. 上位控制器送來的運動命令在這個案例並不存在,也就是沒有上位控制器,沒有脈波命令,沒有正負10V的命令。單獨是智慧型驅動器自己運作而移動馬達。
2. 伺服增益的確是重點之一、但是在討論增益之前、還有一個議題擋住了路、再想看看。
3. 雜訊也應該不是、看看路徑還算漂亮、速度也不醜、所以應該不會是雜訊的問題。
4. 驅動器沒有故障、移動速度最快的地方其實已經實際上跑到3m/s有點快了哦。沒有壞掉。不過提示一下跟驅動器的某個設定有關係。
您願意再挑戰看看嗎?
hongdalee 寫:
會是慣量沒調整好嗎?還是加減速調大一點
這伺服是設定在什麼模式下。位置控制?
若是位置1.4秒後誤差是-500嗎。
移動距離300000單位是?um
ichirolu 寫:沒有上位控制器的話,那是不是驅動器沒有平滑運動的功能? 或是驅動器插補周期太長(插值太粗)?
Liuct2 寫:hongdalee 寫:
會是慣量沒調整好嗎?還是加減速調大一點
這伺服是設定在什麼模式下。位置控制?
若是位置1.4秒後誤差是-500嗎。
移動距離300000單位是?um
hongdalee您好,
不知道您指的調整慣量具體是什麼呢?
這個伺服控制是在位置控制下喔.
讓我們暫時不要考慮穩態誤差, 先專注前面的動態過程.
單位其實在本例子裏面不是重點, 請大家看曲線如何推移. 朝概念性的方向思考.
ichirolu 寫:沒有上位控制器的話,那是不是驅動器沒有平滑運動的功能? 或是驅動器插補周期太長(插值太粗)?
ichirolu你好,
沒有上位控制器並不表示就不會有平滑運動的功能喔. 不過在此題目中, 應該不是在討論平滑運動的問題.
附帶一提,題目中的速度曲線的確不太使用平滑功能, 不過這不成問題喔.
驅動器差補週期看這個圖應該看不出來粗細, 驅動器的插補時間在數十微秒, 其實算是很快的運算,所以問題不大.
hongdalee , 應該不是慣性比或者共振或剛性喔, 可以思考一下驅動器明明有出力(打電流出去), 可是為什麼跟隨誤差卻沒有縮小的這個方面再思考看看.hongdalee 寫:
伺服內的參數,會是慣性比的調整,跟機械共振,及剛性嗎?
只有誤差看起來在最高速時誤差下降減速時誤差又上升。
看來應該"慣性比"較相關
不知是否正確
johnjohn 寫:從前面加速段來看,誤差一直變大,所以應該是加速度不夠大。
在等速段誤差有變小,減速時誤差又變大,所以是太早減速。
不知道上述意見是否合理?
共 9 則回應