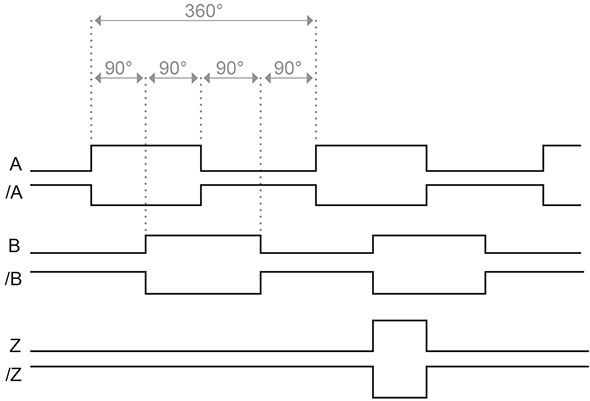
一般我們所看到與討論的增量式編碼器輸出大多為了抗干擾,採用差動輸出的訊號方式,如下圖所示。(電壓範圍以5V為基準)
實際在應用上增量式編碼器輸出的硬體驅動電路其實可以分為3種:電晶體開集極式、推輓式MOSFET晶體式、差動驅動信號式。
1. 電晶體開集極式::比較傳統,但是依照接收端採取不同的接收方式(俗稱sink式與source式)則要有不同的輸出電路,也就是不共用電路
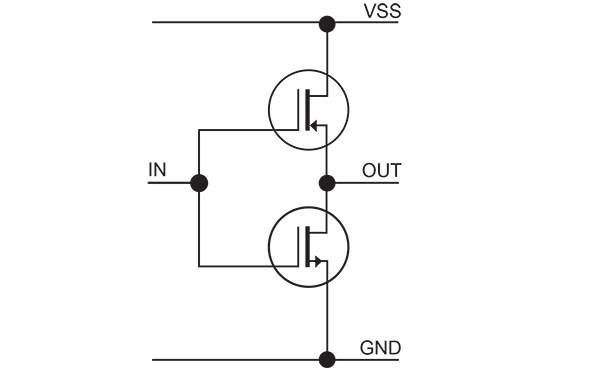
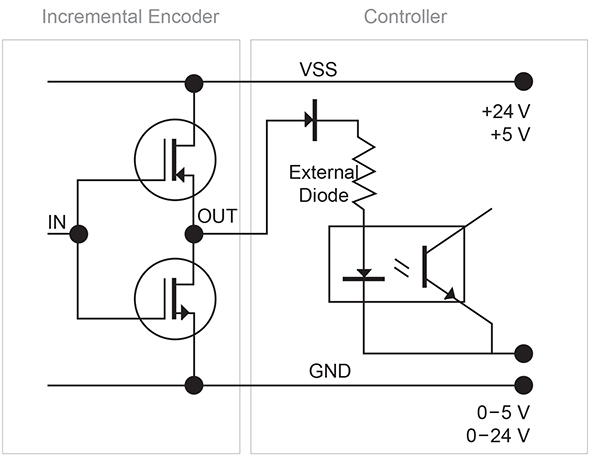
2. 推輓式MOSFET晶體式:改進第1種,可以以一套電路同時支援不同的接收端的電路型式(sink式或source式);在歐洲常稱這種叫HTL (High Threshold Logic)
如下圖所示:
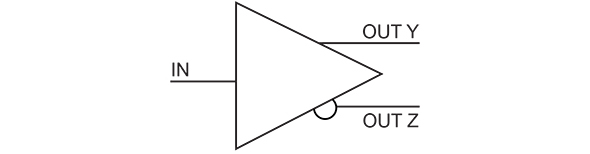
3. 差動式驅動電路(又稱RS-422或TTL),採用5V的技術, 差動方式, 抑制雜訊侵入, 頻寬較高,但傳輸距離較短。
通常1與2這兩類的技術,可以搭配比較長距離的傳輸,例如300公尺的傳輸線,因為採用的電壓比較高 (如8~24V dc)。而3的驅動輸出入技術電壓比較低,傳輸距離較短,例如100公尺,但,抗雜訊能力比較強。
而且傳輸訊號的頻寬可以比較高,也就是支援的光學尺移動速度可以比較快,或者支援解析度較高的光學尺。
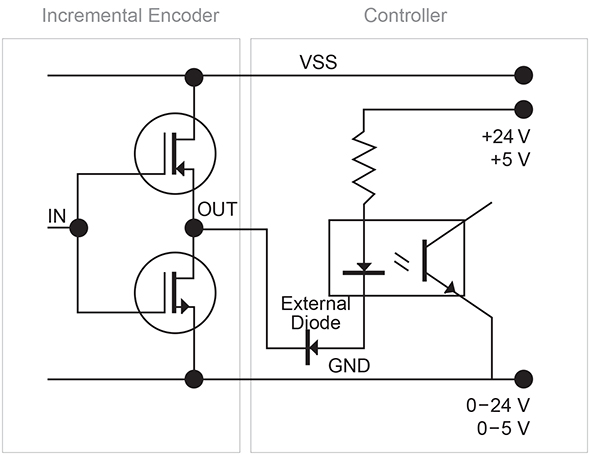
下圖為HTL型的SOURCE接法
下圖為HTL型的SINK接法