
前幾篇有提到PROFIBUS還有PROFINET,這一篇來討論一下什麼是PROFIdrive?
先前的文章有提到PROFIBUS是歷史比較早的總線,趨勢是具有融合Ethernet特性的PROFINET,這些都是使用在工業通訊上,具有及時性通訊特性。
相較於PROFIBUS與PROFINET為總線技術,PROFIdrive其實不是總線通訊技術,而是一種驅動器的控制規範,定義了上位與下位驅動器之間的約定俗成。
如果熟悉EtherCAT的各位,應該有聽過CoE (CANopen over EtherCAT),其中有個DS402 profile,乃是規定驅動器的控制方式,而本篇所探討的PROFIdrive之於PROFINET就等同於DS402 profile之於EtherCAT。角色非常接近。
通常這樣子的應用,驅動器本身其實都具有蠻高階的運算能力,能處理位置控制的功能。
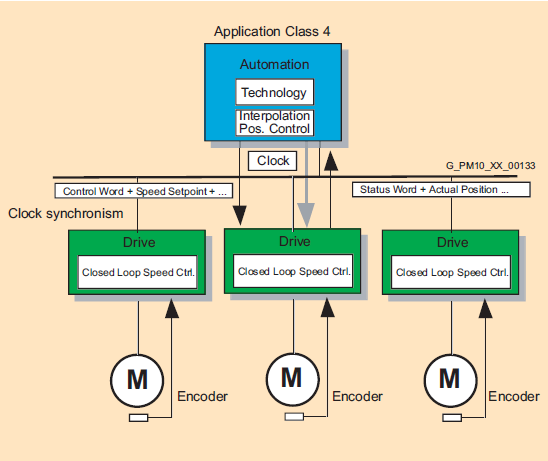
而PROFIdrive中依照了應用的不同予以分級稱為Application Class:
AC 3: 有點類似CoE中的PP(Profile Position mode),在驅動器中已經有定位功能,上位控制器只要告知座標,速度等然後啟動運動命令。
AC 4: 類似CSV不過在西門子技術中有區分為with DSC與without DSC。這個模式上位會以IRT方式嚴格控制控制器與驅動器同步通訊,上位主要會隨著時間綿密地送一大堆速度指令下來給驅動器。
AC 5: 類似CSP模式,也是以IRT嚴格具有同步通訊,上位綿密地送許多位置指令下來給驅動器。而驅動器忠實地追隨指令位置。如果有使用過脈波指令控制伺服馬達的人應該不陌生。此應用模式就是數位網路時代的脈波模式,但是已經不使用落後的脈波當介質了。
以上用了EtherCAT中的幾個名詞CSV, CSP來說明PROFIdrive,補充一下:
CSV: Cyclic Synchronous Velocity mode
CSP: Cyclic Synchronous Position mode
最後上文有提到西門子的用語DSC (Dynamic Servo Control)其實是在早期通訊速度不太快的前提下衍生的一個改善通信延遲(4ms~10ms)所造成的定位性能不良。