
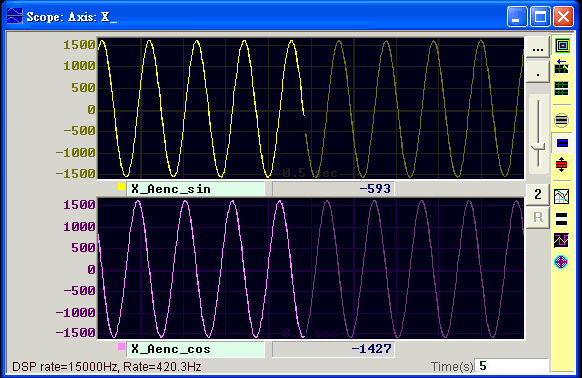
大家平常在使用的伺服馬達通常都會有編碼器或有的使用光學尺,而光學尺其實有分類比式與數位式,一般比較常用的是數位式採用AB相方波,結構簡單,容易實現,只要有簡單的解碼電路,就可以讀取角度或位置。不過今天要講的是類比式的光學尺的訊號,它的信號原始長得像附圖那樣,有兩組弦波,它不像數位式那麼簡單讀取,必須經過比較多的數學運算,不過好處在於兼顧高速度運動與超高解析度的優點,所以歐洲的馬達驅動技術還蠻常用這個類型的光學尺。
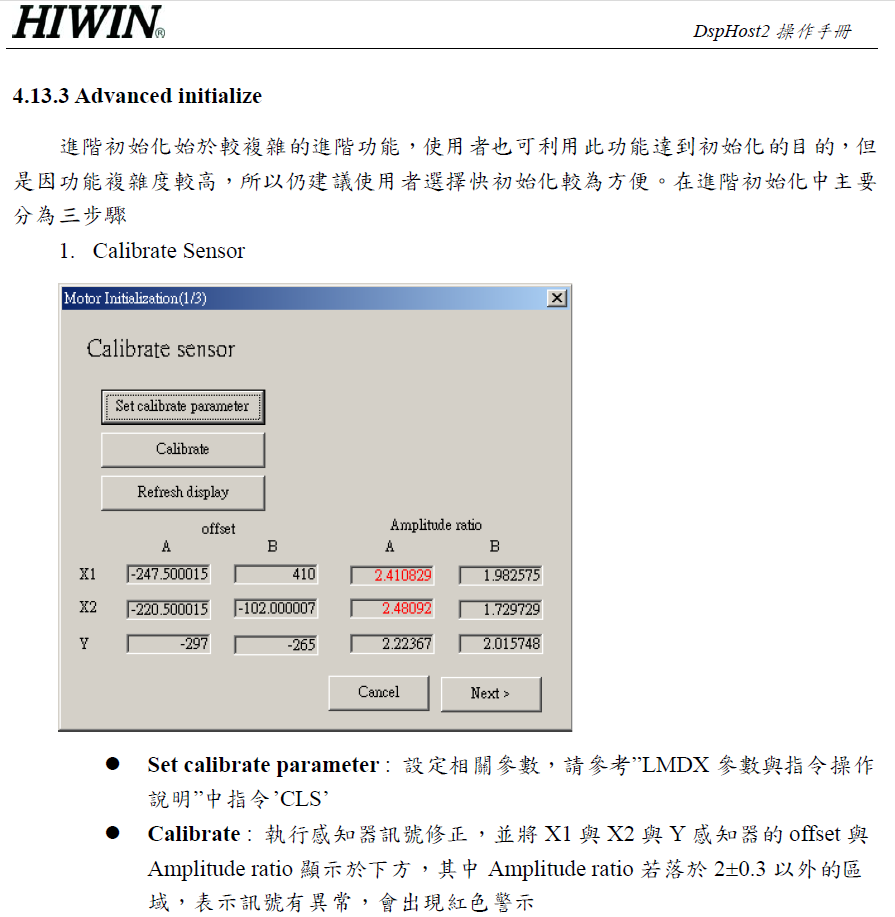
圖中可以看到兩個信號有90度的相位差,而更深入探討,各個相的信號都有各自的直流偏移或直流偏壓,以及各相也有可能具有自己的振幅的差異,理想上兩個信號的偏壓應調整為0,而振幅也應該要一致化(normalize)以得到更高的內插精度。所以第二張圖上的驅動器裡面就可以看到這些東西,它裡面其實有三組類比位置尺的訊號,我們看X1就好其餘類推,畫面上有設定了Offset分A與B這就是兩個弦波的偏壓調整,而畫面右邊有Amplitude ratio的地方則設定了A與B各自的振幅標準化值。通過這些校正就可以讓類比回授訊號計算後的品質更高,精度更好,其實這裡沒有秀出來,另外還有個相位角的參數可以調整原始訊號偏離90度的校正值,更加提升類比回授的內插精度了。因為太複雜,這裡就暫不深入探討。
除了上述提到的數位式與類比式的光學尺,其實近年網路技術發達,許多位置回授都改用串列數位通訊方式,就直接傳導數據而不再像上述方法傳達類比訊號。