
今天再來參考德國大廠的型錄裡面針對現場總線(德文: Feldbus; 英文: field bus)的一些基本描述, 介紹給大家。
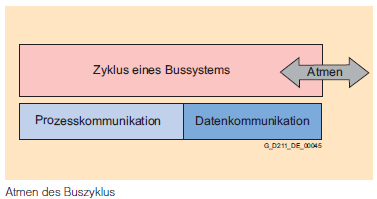
第一張圖裡面說明了工業通訊中的兩大資料內容淺藍色的為Process communication; 較深藍色的為Data communication。從該型錄資料裡面的說明,簡單說明:
Process communication: 通常為控制用的訊號, 如固定週期通訊的指令值, 回授值; 相對的數據量比較小, 大概4~32bytes之譜。基本上掛在網路上的傳感器,輸入輸出設備的數量基本上都可以算得出來,也比較固定,因此通訊週期比較固定。
Data communication: 指的是數據量比較大的通訊,大概>100 bytes之譜, 這些資料多用於機器設定的階段, 並不實際在正式運轉的同時產生通訊的交通, 它的特質為非週期性。
在第一張圖的粉紅色的方塊說明的是匯流排的週期,而圖中的左右箭頭寫的文字是說明"呼吸",用來形容傳統網路如果要納入這些工業通訊資料會有"呼吸"的問題,其實是在講整個通訊的週期會像呼吸一樣忽長忽短,完全不適用於工業設備的通訊上。
為了讓通訊系統可以支援數位工業控制,就必須考慮上述兩種工業通訊資料而且也要達到固定週期的基本要求。
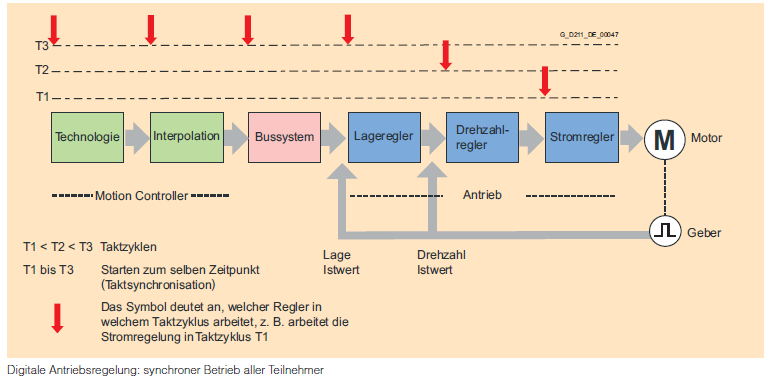
第二張圖說明,馬達控制上從結構而言,主要構成的有:數位位置迴路,速度迴路,電流迴路層層相扣。而常見的結構是位置計算或速度計算的上位控制器不一定與控制電流的驅動器同為一體,而遠離,此時就必須導入field bus總線通訊系統,而這個通訊系統必須嚴格支援前述的等週期而且同步的通訊才可以穩定控制馬達。
圖中T1對應的是電流迴路的週期, 其他則依序對應到速度與位置迴路。
綠色的方塊屬於比較高階的計算,例如位置的內插運算與程序控制運算;藍色則為位置,速度與電流控制。最右邊白底黑字M為馬達, 以及下面的為編碼器提供角度資訊以及速度資訊。
其實上述西門子的分類所介紹Profibus或Profinet的Process communication就相當於PDO而Data communication就相當於SDO。有關這兩個CANopen甚至延伸到EtherCAT的通訊概念, 請大家也可以參考本論壇中下列文件的內容:
CiA 402定義的控制模式
http://www.imtf4.tw/topicdetail.php?t=1045